Explained DGPS: How It Improves Location Accuracy in Navigation Systems
What is DGPS?
A DGPS stands for Differential Global Positioning System. It is an enhancement to the Global Positioning System (GPS) which provides improved location accuracy, in the range of operations of each system, from the 15-meter nominal GPS accuracy to about 1–3 centimeters.
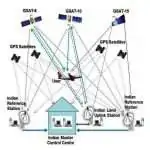
Each DGPS uses a network of fixed ground-based reference stations to broadcast the difference between the positions indicated by the GPS satellite system. Differential correction can be applied in real-time directly in the field or when post-processing data is in the office.
The Coast Guard developed Differential GPS or DGPS, which is another correctional differential signal. It uses two receivers, a precisely surveyed reference station, and a moving receiver.
The stationary receiver works in reverse by using its location to determine the timing errors, from the satellites. It figures out what the time travel should be and compares it to what the satellite sends. It then sends out a correction signal to the moving receiver.
There are two control centers and 60 plus remote broadcast sites. It allows for one to three-meter error typically but ten-meter accuracy in all established coverage areas. It reached Full Operational Capacity on March 15, 1999.
How DGPS Works?
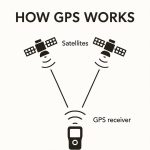
It takes two receivers to gain the benefits of differential GPS. That’s the basic meaning of differential comparing two different GPS signals to more accurately determine your location.
The DGPS receiver receives signals from the satellites and computes its pseudo-ranges. But it also receives correction signals from a reference source or base station that already knows its exact location. Your receiver applies these corrections to its computed pseudo ranges to produce a much more accurate position. This ‘real-time’ DGPS is the predominant form of differential GPS.
A second form, post-processed DGPS, uses a separate computer and specialized software to compute the position solution after the fact. The raw (uncorrected) data from your receiver is sent to the computer along with raw data from the reference source. To begin, let’s use your DGPS receiver and a generic GPS base station.
- Reference Station:
- A known, fixed location with a GPS receiver.
- It compares its known location with GPS satellite data to calculate errors.
- Correction Signal:
- The station sends correction signals to nearby roving GPS receivers via radio or internet.
- These corrections help eliminate errors like satellite orbit, clock drift, and atmospheric delays.
- User Receiver:
- A mobile GPS device receives both satellite signals and DGPS corrections.
- It applies the correction to compute a more accurate position.
GPS Receiver
Use 2 Receiver in differential GPS system-
Roving Receiver
The rover determines your location as you move around, just as your basic GPS receiver does. The primary differences between the basic GPS receiver and Rover receiver are:
- A radio receiver in the rover to gain the differential corrections from the base station.
- Extra software to combine these corrections with the rover’s computed pseudo-ranges.
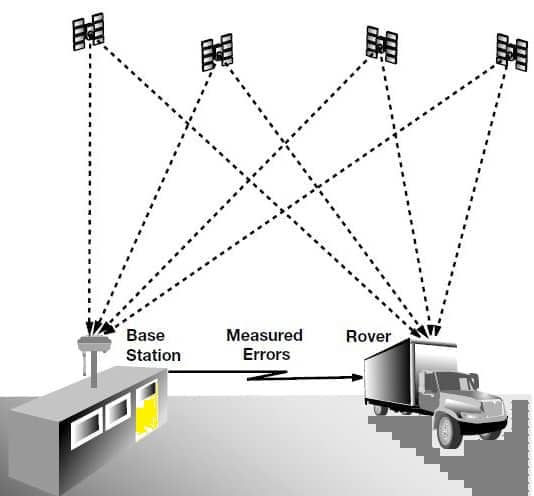
Base Receiver
The reference receiver or base station is a GPS receiver located at a fixed position that has been surveyed. Base receiver is:
- Tracks all the satellites in view and measures their pseudo-ranges.
- Solves the GPS problem in reverse to determine what the pseudo-ranges.
- Generates a list of corrections needed to make the measured pseudo-range values accurate for all visible satellites.
- Communicates Communicate the correction information to the rover.
DGPS Stations
Every DGPS station has two reference stations with unique ID numbers. One reference station is active and connected to the radio transmitter, and the other reference station is a reserve. The user equipment will display the ID number of the active reference station.
Difference between GPS vs DGPS
- The major difference between GPS and DGPS is Accuracy. DGPS position accuracy is approx 1 to 2 m, or less.
- GPS has a single receiver called the Reference Receiver. DGPS has two receivers, namely Reference Receiver and the Rover Receiver.
- DGPS is much less affected by atmospheric conditions and system errors.
| Error Source | GPS | DGPS |
|---|---|---|
| System Errors Ephemeris Data Satellite Clocks | 0.4–0.5m 1–1.2m | Removed Removed |
| Atmospheric Error Ionosphere Troposphere | 0.5–5m 0.2–0.7m | Mostly Removed Removed |
| Receiver Errors Multi-path Errors | 0.1–3m 0–10m | 0.1–3m 0–10m |
Real-Time DGPS
For real-time DGPS the correction data usually is transmitted via a radio link from the base station calculates and broadcasts corrections for each satellite as it receives the data. The correction is received by the roving receiver via a radio signal. As a result, the position displayed and logged to the data file of the roving GPS receiver is a differential corrected position. Mobile phone links also can be used, but they are more limited in speed and connectivity.
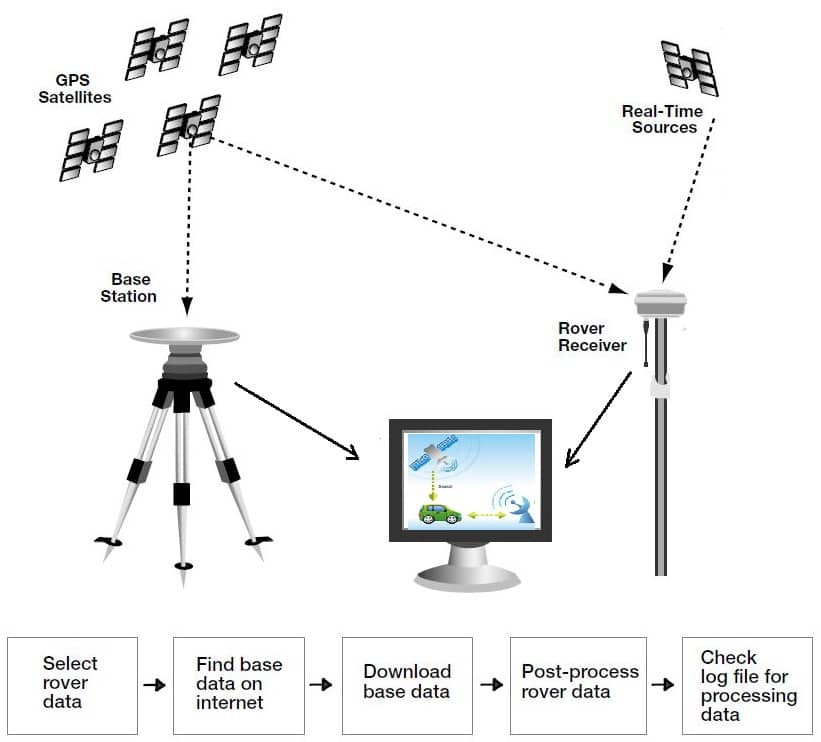
Post-Processing DGPS
Post-processed DGPS can achieve better accuracy by using multiple base observations from before and after the measurement. Post-processing techniques require raw GPS base data to be stored in digital files that are later processed against raw GPS rover files by specialized Software. The data from both the rover and the base station must contain simultaneous pseudo-range measurements to at least four satellites in common, as well as precise time stamps for each measurement.
The post-processing software calculates the error in each GPS pseudo-range measurement logged by the reference station receiver and applies the error corrections to the measurements in the rover data file. Accuracy can be sub-meter and better, but this depends on the capabilities of the rover receiver and the type of post-processing software used.