Aerial Photogrammetry: Mapping the World from Above
Aerial photogrammetry—once a secret weapon in war—has become an essential tool in shaping the modern world. From mapping battlefields during World Wars to charting entire continents from orbit, this science has seen a dramatic transformation. Today, it plays a critical role across industries, enabling high-resolution data capture for applications ranging from agriculture to urban planning, and even entertainment. In the commercial sector, aerial imagery is increasingly leveraged for precision farming, real estate development, asset inspections in power and infrastructure, mining volume calculations and virtual tourism.
What is Photogrammetry?
The Photogrammetry is the art, science and technology of obtaining reliable information about physical objects and the environment through the process of recording, measuring and interpreting photographic images and patterns of Electromagnetic radiant imagery and other phenomena (American Society of Photogrammetry, 1980).
Photogrammetry can be used to measure and interpret information from hardcopy photographs or images. Sometimes the process of measuring information from photography and satellite imagery is considered metric photogrammetry, such as creating DEMs. Interpreting information from photography and imagery is considered interpretative photogrammetry, such as identifying and discriminating between various tree types as represented on a photograph or image (Wolf, 1983).
Types of Photogrammetry:
Photogrammetry can be classified two ways, based on camera location during photography.
- Terrestrial Photogrammetry
- Aerial Photogrammetry
Terrestrial Photogrammetry
The Terrestrial photography also called Close-range Photogrammetry. Usually this type of photogrammetry is non-topographic, that is the output is not topographic products, like terrain models or topographic maps, but instead drawings, 3D models, measurements, or point clouds.
Aerial Photogrammetry
Aerial Photogrammetry is a technique of capture photographing to the Earth’s surface. Aerial photography is the taking of photographs helps to an aircraft, helicopters, balloons, blimps, dirigibles, rockets, parachutes, etc. In recent times use Drone to capture Aerial Photographs.
At the heart of most photogrammetric systems is the use of visible light from the electromagnetic (EMR) spectrum, captured through RGB (red, green, blue) sensors. Visible light occupies the portion of the EMR spectrum between approximately 400–700 nm in wavelength (or 430–770 THz in frequency) and is used because it closely mimics what the human eye can perceive, making the outputs intuitive to interpret. However, visible light has limitations—it cannot penetrate cloud cover, dense smoke, or thick vegetation canopies, which can obscure ground features and limit data collection in certain environments or weather conditions. This makes clear, daylight conditions optimal for RGB-based aerial mapping missions.
As the demand grows, the Indian geospatial industry is witnessing a surge in opportunities for professionals skilled in drone operations, GIS software, 3D modeling, and remote sensing analytics. Freshers and recent graduates can enter the field by building expertise in tools like QGIS, Pix4D, and Polycam 3D, and by gaining certifications in drone piloting and spatial data processing. Freelancing opportunities are also abundant—particularly for those who can offer end-to-end services, from flight planning and data capture to orthomosaic generation and client-ready reports.
This article explores the spectrum of aerial photogrammetric techniques across various carriers, focusing on technological evolution, application-specific payloads, and the integration of LiDAR with UAVs for unparalleled precision.
Aerial Platforms: The Carriers of Modern Mapping
1. Airplanes
Fixed-wing aircraft continue to play a critical role in aerial photogrammetry, especially for covering large areas quickly and efficiently. Typically flying at altitudes between 500 to 5,000 meters, these aircraft are equipped with high-precision cameras, GNSS/IMU systems, and gyrostabilized mounts to ensure accuracy. The resulting imagery can achieve ground sampling distances (GSD) of 5 cm to 50 cm, depending on the altitude and sensor configuration. Airplane-based surveys are ideal for nationwide base mapping, infrastructure corridor planning and disaster management.

2. Unmanned Aerial Vehicles (UAVs)
Drones have brought photogrammetry within reach for a wide range of industries. Operating typically below 120 meters (in compliance with drone regulations in many countries), UAVs can capture ultra-high-resolution imagery, often achieving 1 cm or finer GSD. This makes them invaluable for construction progress monitoring, mining volume estimations, and precision agriculture.
Multirotor UAVs are best suited for detailed, localized data collection due to their vertical takeoff, hovering, and agile maneuvering. Fixed-wing UAVs, on the other hand, are better for linear infrastructure mapping such as pipelines and highways. In India, companies like Gamma Rotors, Garuda Aerospace and IG Drones provide cutting-edge drone surveying solutions for smart cities, railways, and industrial facilities.
3. Satellites
Satellites offer unparalleled global coverage, ideal for macro-scale mapping, long-term monitoring, and inaccessible terrain analysis. Operating in orbits around 500 to 800 km above the Earth, modern satellites can produce orthomosaic imagery, DSM/DTM models, and multispectral or hyperspectral data. The spatial resolution of commercial satellite imagery now reaches as fine as 30 cm.
Pixxel, A Bengaluru-based startup supported by Google, is building a hyperspectral satellite constellation capable of capturing up to 400 spectral bands, enabling precise monitoring of air pollution, crop health, water stress, and industrial emissions—unlocking insights beyond traditional visual imagery. While satellites may trade off spatial precision for scale and frequency, their ability to provide regular, consistent updates across vast regions makes them a vital part of the modern geospatial toolkit.
Table: Comparison of Aerial Mapping platforms by altitude, cost and data precision.
| Carrier Type | Operating Altitude | Average Operational Costs (INR) | Ground Sampling Distance (GSD) |
|---|---|---|---|
| Airplanes | 500 – 5,000 meters | ₹10 – ₹25 lakhs per survey mission | 5 cm – 50 cm |
| UAVs (Drones) | Up to 120 meters | ₹20,000 – ₹2 lakhs per project | ≤ 1 cm |
| Satellites | 500 – 800 km (LEO) | ₹50 lakhs – ₹5 crores (tasking/purchase) | ~30 cm |
Types of Aerial Photogrammetry and Use Cases
Aerial photogrammetry can be broadly categorized into three main types: vertical, oblique, and multi-view photogrammetry—each serving distinct purposes.
- Vertical photogrammetry- captures images from directly above the ground, providing a consistent bird’s-eye view suitable for creating topographic maps, land-use plans, and cadastral surveys. One prominent application is in flood risk assessment, where planners use vertical imagery to generate detailed elevation maps that identify drainage paths and vulnerable low-lying zones.

- Oblique photogrammetry– on the other hand, involves capturing images at an angle, revealing side views of buildings and terrain features. This perspective is especially valuable for urban planning and infrastructure monitoring. For example, engineers employ oblique imagery to inspect rooftops and building facades for signs of structural damage, enabling early maintenance interventions.
- Multi-view photogrammetry– goes a step further by combining images from multiple angles to create high-resolution 3D models. In Building Information Modeling (BIM) projects, this approach enables the generation of accurate, up-to-date spatial data for existing structures. Construction teams and architects use these models to assess current conditions, plan retrofits, and coordinate design elements with precision. Together, these photogrammetry types provide a versatile toolkit for professionals across disciplines like environmental monitoring, construction, and infrastructure development.
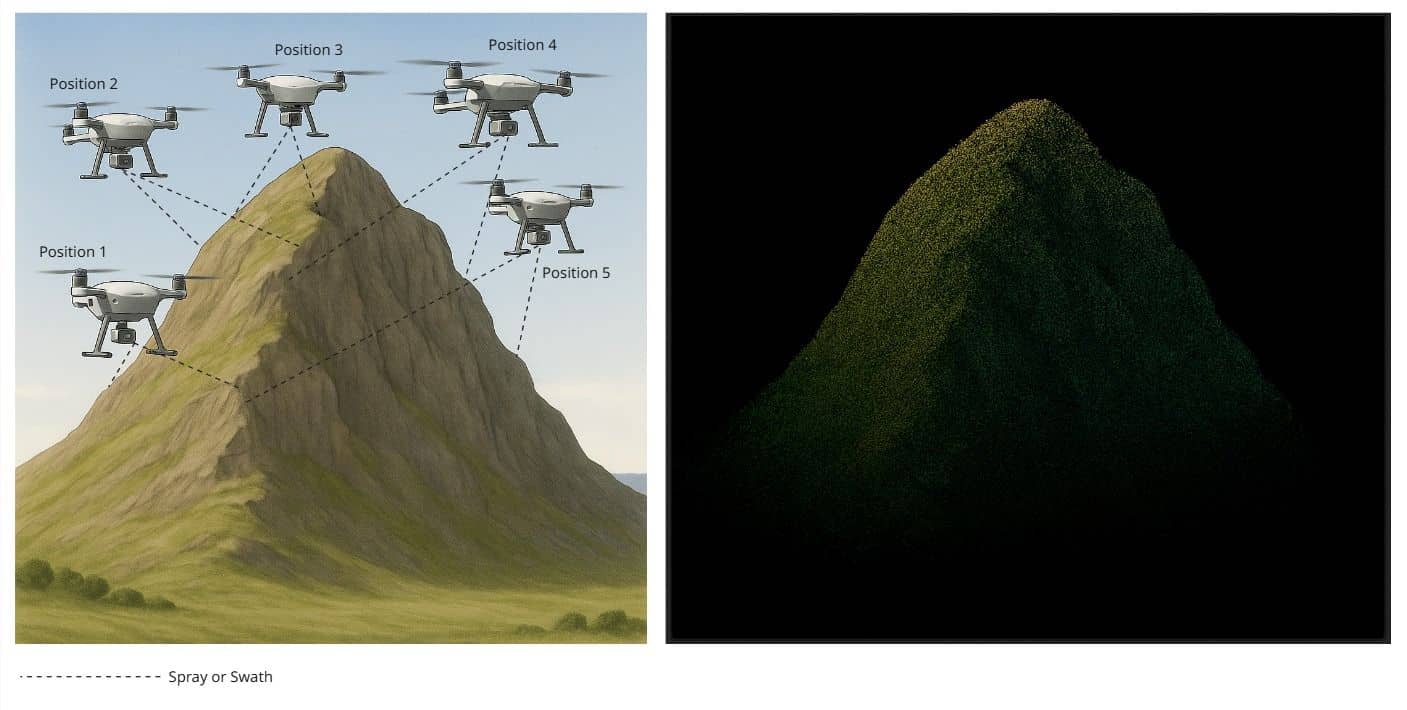
LiDAR-Enabled UAV Photogrammetry: A Leap in Accuracy
While traditional aerial photogrammetry relies on image matching to generate 3D point clouds, LiDAR uses active laser pulses to directly measure distances from the sensor to the ground, regardless of lighting or surface texture. When mounted on UAVs, LiDAR technology transforms low-altitude mapping into a highly accurate and dense 3D modeling system.
A typical UAV-based LiDAR system comprises:
- A laser scanner,
- GNSS receiver,
- Inertial Measurement Unit (IMU),
- Optional RGB camera for colorization.
These components work together to produce georeferenced point clouds with horizontal accuracy typically ranging between 2–5 cm and vertical accuracy of 3–10 cm, depending on the flying height and system quality. High-end systems can achieve even finer resolution, especially when combined with post-processed kinematic (PPK) GNSS data.
LiDAR-equipped UAVs outperform traditional photogrammetric cameras in scenarios involving dense vegetation, narrow corridors (such as powerlines), or rugged terrain where image-based matching may fail. Moreover, LiDAR captures multiple returns, allowing ground surface modeling even beneath forest canopies—a feat unachievable with passive optical sensors alone.
Depth perception, a key limitation of 2D imagery, is natively integrated into LiDAR-based systems, offering a significant edge in applications like volume calculations, terrain modeling, and structural inspections. The precision and point density delivered by LiDAR (often exceeding 500,000 points per second) make it indispensable for survey-grade deliverables.
Applications in Vegetation Monitoring and Utility Asset Management
Aerial photogrammetry plays a pivotal role in monitoring vegetation health and managing both rural and urban infrastructure assets.
Vegetation Monitoring
Using multispectral and hyperspectral sensors, UAVs can assess parameters like:
- Normalized Difference Vegetation Index (NDVI)
NDVI= (NIR−RED) (NIR+RED) / (NIR+RED) (NIR−RED)
RED: Red Light Reflectance – the amount of visible red light reflected by the surface. Healthy plants absorb red light for photosynthesis, so reflectance is typically low.
NIR: Near-Infrared Reflectance – the amount of near-infrared light reflected by the surface. Healthy vegetation reflects strongly in this band.
- Leaf Area Index (LAI)
LAI= Aleaf / Aground
A(leaf): Total one-sided area of leaf surface per unit ground area
A(ground): Area of the ground surface
- Chlorophyll content
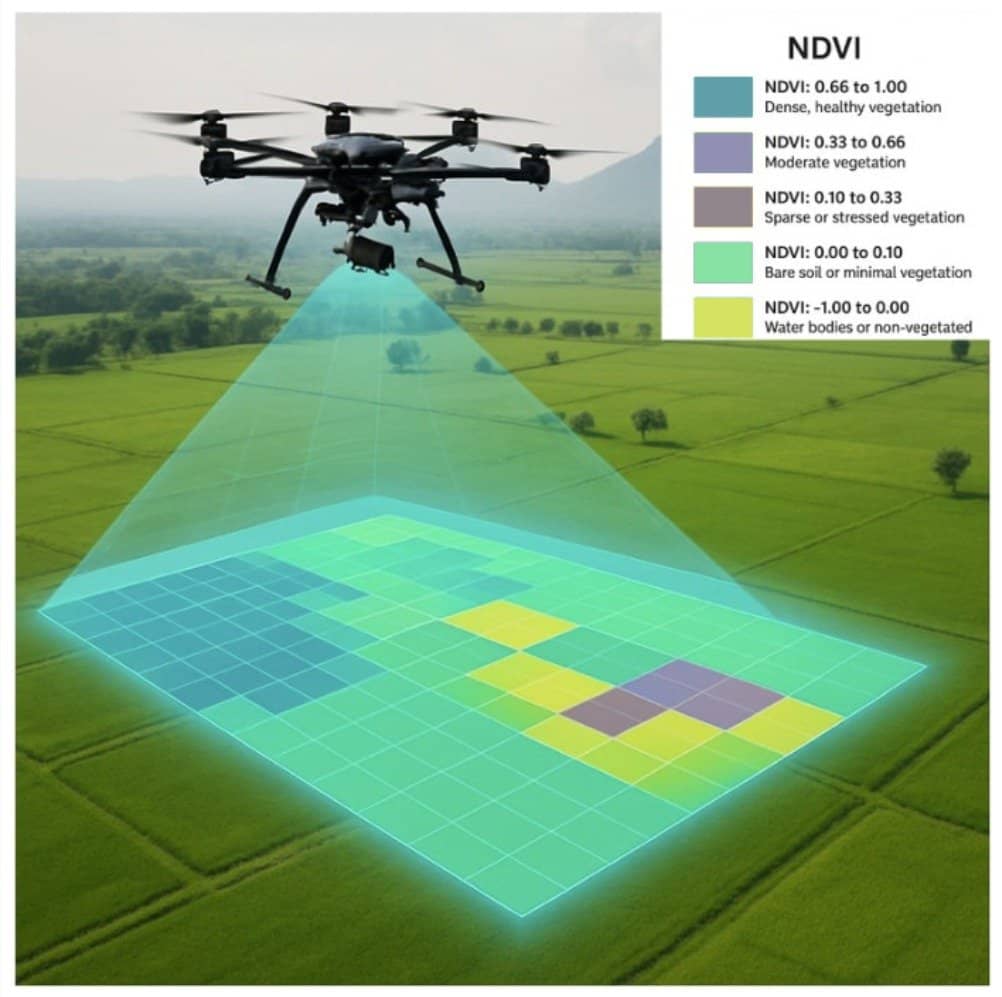
These indices help identify crop stress, disease outbreaks, water deficiency, or invasive species. Farmers use this data to inform irrigation, fertilization, and harvesting schedules. Forestry departments track canopy coverage, deforestation patterns, and forest regeneration efforts. Seasonal comparisons enable proactive responses to environmental degradation or climate effects.
Utility Asset Access and Maintenance
UAV photogrammetry enables inspection of:
- Power lines and substations,
- Water and gas pipelines,
- Telecom towers,
- Roadway networks and bridges.
High-resolution Ortho mosaic imagery, 3D points clouds, and thermal data allow engineers to detect cracks, corrosion, vegetation encroachment, or structural deformities. In rural areas where ground access is restricted or costly, UAVs provide a rapid, scalable alternative to traditional foot patrols. Urban settings benefit equally, where drones can navigate dense infrastructure to inspect rooftops, gutters, and drainage systems.

GIS integration of UAV-generated datasets ensures that asset locations are precisely mapped, monitored over time, and incorporated into smart city frameworks or digital twin environments.
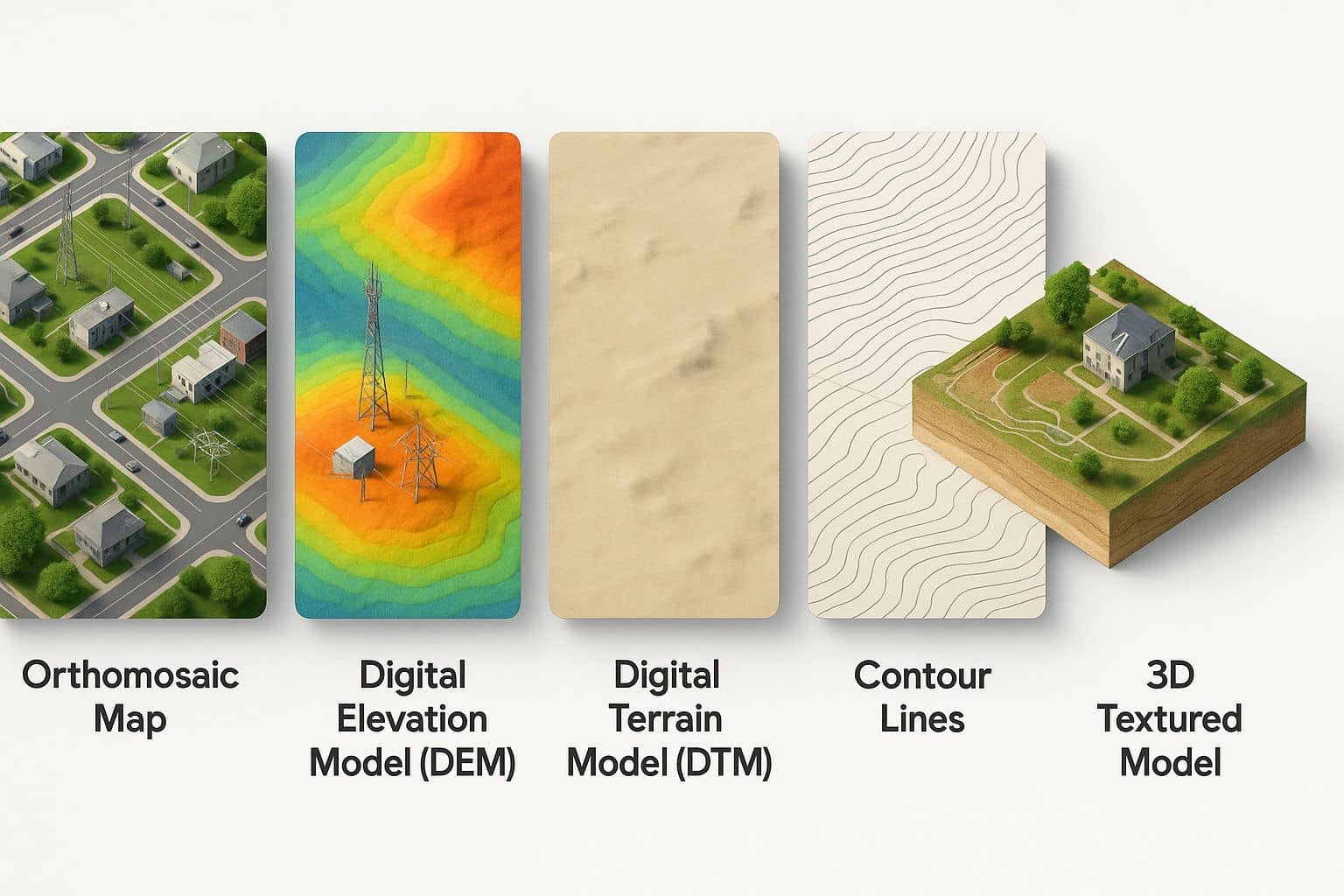
Data Outputs from Photogrammetric Processing
- Orthomosaics: Orthomosaics are high-resolution, geometrically corrected aerial images stitched together from multiple photos. They provide a map-like image where scale is uniform and distortion is removed, making them suitable for precise measurements.
- Digital Elevation Models (DEMs): DEMs represent the Earth’s surface, including natural and man-made features, by capturing elevation values. These are used for terrain analysis, flood modeling, and infrastructure planning.
- Digital Terrain Models (DTMs): DTMs are similar to DEMs but exclude above-ground objects like trees and buildings. They show the bare-earth terrain and are useful in hydrology and land development studies.
- Contour Maps: Contour maps display elevation lines that represent terrain shape and slope. They are essential for understanding topography and planning construction or drainage.
- 3D Textured Models: These are realistic 3D representations of terrain or structures, combining geometric data with high-quality textures. They are used in visualization, simulation, and inspection tasks.
Factors Influencing Accuracy
- Ground Control Point (GCP) Distribution: GCPs are known coordinates placed in the survey area and used to georeference the model. A well-distributed set of GCPs enhances positional accuracy across the entire dataset.
- Camera Calibration: Accurate calibration ensures that lens distortions and sensor characteristics are correctly accounted for in the image processing. This improves both spatial accuracy and 3D reconstruction quality.
- Flight Overlap (70% frontlap, 60% sidelap): High overlap ensures that each part of the terrain is captured from multiple angles, aiding in reliable feature matching and accurate 3D modeling. Insufficient overlap can cause gaps or errors in the output.
- Terrain Complexity: Rugged or highly variable terrain may introduce distortion or shadowing, which complicates photogrammetric reconstruction. More flight passes and higher resolution imagery may be required in such areas.
- Atmospheric Conditions: Especially in satellite imagery, haze, clouds, or varying light conditions can degrade image clarity and distort results. Stable, clear weather is ideal for high-precision data capture.

For survey-grade precision, ground control and PPK or RTK GNSS positioning are crucial. UAVs with RTK modules like DJI M350 RTK or SenseFly eBee X can achieve centimeter-level accuracy even in challenging environments.
Specialized UAV Payloads for Diverse Applications
The versatility of UAVs is amplified by the wide variety of camera and sensor payloads available, each tailored to specific operational objectives. Here’s a look at some advanced categories:
1. Cinematography and Real Estate Marketing
High-end drones like DJI Inspire 3 or Freefly Alta systems carry cinematic-grade cameras such as the RED Komodo or Sony FX6. These deliver stabilized 6K or 8K video footage, ideal for film production and premium real estate showcases. The immersive aerial visuals offer dynamic perspectives that traditional land-based shooting cannot replicate.

2. Surveillance and Law Enforcement
Thermal infrared (IR) and night vision-equipped UAVs are widely deployed for monitoring public spaces, border control, and tactical operations. Dual-camera systems allow for both daytime and thermal imaging, essential for spotting hidden threats or intrusions.
3. Search and Rescue Operations
In emergency scenarios, UAVs equipped with thermal cameras, GPS, and loudspeakers assist in locating missing persons or assessing disaster zones. Fixed-wing VTOL (vertical takeoff and landing) drones offer extended flight times and can scan larger areas quickly compared to multirotor UAVs.
4. Infrastructure Inspection
Drones fitted with zoom cameras (up to 30x optical), LiDAR, or radiometric thermal sensors inspect bridges, wind turbines, solar farms, and transmission lines without human exposure to hazards. These inspections can be automated and repeatable, improving safety and maintenance scheduling.
5. Scientific and Environmental Monitoring
Multispectral and hyperspectral sensors mounted on UAVs capture detailed data across various wavelengths to assess plant health, mineral composition, or pollution levels. Applications include precision agriculture, habitat assessment, and pollution control.
6. Miscellaneous Applications
Aerial photogrammetry technology mounted on UAVs is finding diverse applications beyond conventional mapping. In logistics, it enables optimized route planning and site assessments for drone-based delivery systems, including medical supply drops in remote areas. Event organizers use photogrammetry for crowd density analysis and layout planning. In environmental conservation, it aids in monitoring wildlife habitats and tracking changes in forest cover. Even in archaeology, UAV photogrammetry helps create detailed 3D reconstructions of excavation sites. These varied uses highlight the technology’s adaptability across fields requiring accurate spatial data and rapid situational awareness.
Image and Data Acquisition
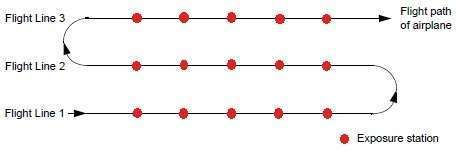
During photographs or image collection, overlapping images are exposed along a direction of flight. Most photogrammetric applications involve the use of overlapping images. In using more than one image, the geometry associated with the camera/ sensor, image, and ground can be defined to greater accuracies and precision.
The collection of imagery, each point in the flight path at which the camera exposes the film, or the sensor captures the imagery, is called an exposure station.
The image scale expresses the average ratio between a distance in the image and the same distance on the ground. It is computed as focal length divided by the flying height above the mean ground elevation. For example, with a flying height of 1000 m and a focal length of 20 cm, the image scale would be 1:5000
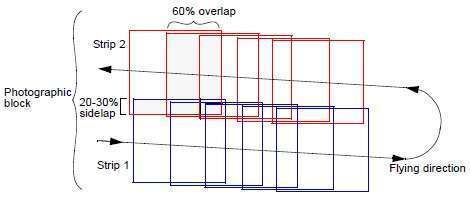
A strip of photographs consists of images captured along a flight line, normally with an overlap of 60%. All photos in the strip are assumed to be taken at approximately the same flying height and with a constant distance between exposure stations.
A block of photographs consists of a number of parallel strips, normally with a side lap of 20-30%. Block triangulation techniques are used to transform all of the images in a block and ground points into a homologous coordinate system.
Interior Orientation of Photogrammetry
Interior orientation defines the internal geometry of a camera or sensor as it existed at the time of data capture. It is primarily used to transform the image pixel coordinate system or other image coordinate measurement system to the image space coordinate system.
The internal geometry of a camera is defined by specifying the following variables:
- Principal point
- Focal length
- Fiducial marks
- Lens distortion
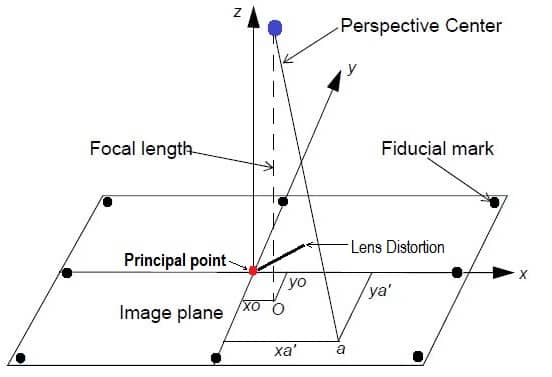
Principal point
Principal point is mathematically defined as the intersection of the perpendicular line through the perspective center of the image plane.
Focal length
The length from the principal point to the perspective center is called the focal
length.
Fiducial marks
The image positions of the fiducial marks are measured on the image, and subsequently compared to the calibrated coordinates of each fiducial mark.
Lens distortion
Lens distortion deteriorates the positional accuracy of image points located on the image plane. Two types of radial lens distortion exist: Radial and Tangential lens distortion.
Exterior Orientation of Photogrammetry
Exterior orientation defines the position and angular orientation associated with an image. The variables defining the position and orientation of an image are referred to as the elements of exterior orientation. The elements of exterior orientation define the characteristics associated with an image at the time of exposure or capture.
The positional elements of exterior orientation include:
- Xo
- Yo
- Zo
They define the position of the perspective center (O) with respect to the ground space coordinate system (X, Y, and Z). Zo is commonly referred to as the height of the camera above sea level, which is commonly defined by a datum.
The angular or rotational elements of exterior orientation describe the relationship between the ground space coordinate system (X, Y, and Z) and the image space coordinate system (x, y, and z).
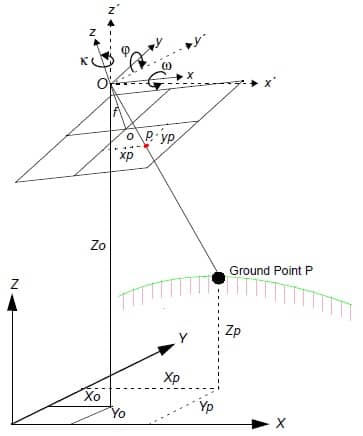
Three rotation angles are commonly used to define angular orientation:
- omega(Ω) – a rotation about the photographic x-axis
- phi(φ) – a rotation about the photographic y-axis
- kappa(κ) – a rotation about the photographic z-axis
Photogrammetry Software’s (Free)
| Name | OS | License |
|---|---|---|
| COLMAP | Windows, macOS, Linux | Free |
| Meshroom | Windows, Linux | Free |
| MicMac | Windows, macOS, Linux | Free |
| Multi-View Environment | Windows, macOS | Free |
| OpenMVG | Linux, Windows, MacOS | Free |
| Regard3D | Windows, macOS, Linux | Free |
| Bentley ContextCapture | Windows | On request |
| Elcovision 10 | Windows | On request |
| iWitnessPro | Windows | On request |
| IMAGINE Photogrammetry | Windows | On request |
| SOCET GXP | Windows | On request |
| Trimble Inpho | Windows | On request |
Conclusion
Aerial photogrammetry, once the exclusive domain of military reconnaissance and national mapping agencies, has evolved into a mainstream geospatial discipline enabled by accessible UAVs, advanced sensors, and powerful processing software. The integration of LiDAR with drones has unlocked new frontiers in mapping accuracy and depth perception, essential for engineering, forestry, and terrain modeling.
From capturing cinematic vistas to inspecting high-voltage lines or evaluating agricultural fields, aerial photogrammetry now serves a range of industries with precision, safety, and scalability. As technology progresses, expect continued convergence of AI, edge computing, and real-time analytics into the aerial mapping ecosystem, propelling it from a passive data collection tool into a proactive decision-making instrument.
In the skies above us, data is being captured, interpreted, and leveraged—one pixel, one point cloud, and one laser pulse at a time.